
Explorando NVIDIA Isaac GR00T






La robótica humanoide está transformando profundamente nuestra relación con las máquinas al permitir interacciones más naturales y adaptables. En este campo en rápida evolución, NVIDIA Isaac GR00T se posiciona como una innovación esencial que integra inteligencia artificial multimodal capaz de procesar datos de diversas fuentes, comprender y replicar las acciones humanas y adaptarse de forma autónoma a entornos dinámicos. Este avance representa un cambio crucial. Supone un avance significativo en sectores clave como la industria, la atención médica y la sostenibilidad, al tiempo que aborda desafíos globales como la escasez de mano de obra, las demandas de personalización y la búsqueda de soluciones eficientes y sostenibles.
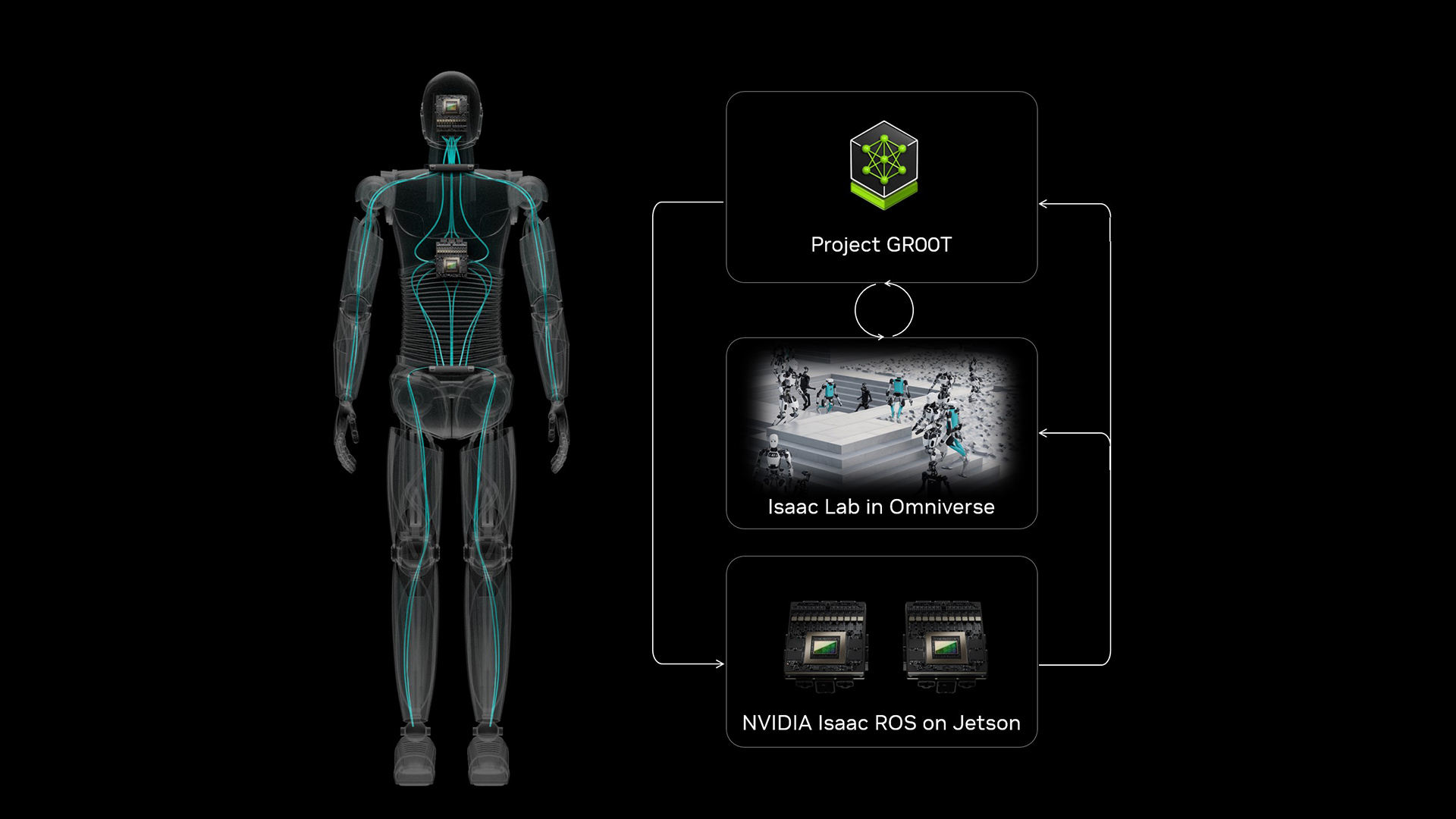
Figura 1: Ecosistema NVIDIA Isaac GR00T que vincula a GR00T, Isaac Lab en Omniverse e Isaac ROS en Jetson para el desarrollo de robótica.
El impacto de NVIDIA Isaac GR00T se extiende a una amplia audiencia, incluidos investigadores, desarrolladores de tecnología, líderes empresariales y entusiastas de la robótica que buscan aprovechar su potencial transformador. Los ingenieros de inteligencia artificial encuentran en el GR00T una herramienta única para explorar modelos que permiten a los robots aprender, adaptarse y colaborar en tareas complejas, mientras que quienes toman decisiones estratégicas en los sectores industriales descubren una solución innovadora que conecta la inteligencia artificial con las necesidades emergentes de la sociedad Los responsables de la toma de decisiones estratégicas en los sectores industriales pueden aprovechar el GR00T para alinear las capacidades de la IA con las demandas sociales. Esta tecnología no solo aumenta la productividad y mejora la calidad de vida, sino que también se establece como un catalizador para un futuro en el que los humanos y los robots colaboren de manera eficiente, ampliando así las posibilidades de desarrollo en un mundo en constante evolución.
¿Qué es NVIDIA Isaac GR00T?
NVIDIA Isaac GR00T, o Generalist Robot 00 Technology, es una plataforma innovadora que establece un nuevo marco para el desarrollo de la robótica humanoide mediante la integración de la inteligencia artificial (IA) y las capacidades de aprendizaje multimodal. Isaac GR00T actúa como la «mente» de los robots humanoides, lo que les permite entender el lenguaje natural, analizar información de múltiples fuentes, como texto, voz, vídeo y demostraciones humanas, y adquirir las habilidades esenciales para adaptarse a tareas complejas en diversos entornos.
El enfoque multimodal del GR00T radica en su capacidad para procesar y combinar información de diferentes canales, lo que permite a los robots comprender los contextos de manera integral y realizar acciones con un alto nivel de habilidad y coordinación. Esta capacidad de integrar múltiples modalidades no solo acelera el aprendizaje, sino que también optimiza la interacción entre humanos y robots, lo que permite a los robots interpretar las intenciones y demandas humanas de forma más intuitiva al combinar flujos de datos. El GR00T acelera el aprendizaje al tiempo que fomenta interacciones entre humanos y robots intuitivas y fluidas.
El GR00T se ha diseñado para apoyar el aprendizaje rápido y continuo en escenarios simulados y del mundo real, lo que permite a los robots desarrollar habilidades que van más allá de la mera ejecución mecánica. Como se mencionó anteriormente, gracias a su capacidad para observar las acciones humanas y aprender de ellas, los robots pueden adquirir conocimientos prácticos que les permiten operar en entornos dinámicos, respondiendo a los desafíos en tiempo real con niveles de precisión y adaptabilidad.
Para garantizar su éxito, NVIDIA Isaac GR00T integra tecnologías avanzadas como:
- Jetson Thor: Un sistema en chip (SoC) especializado para tareas robóticas complejas.
- Omniverse e Isaac Sim: Herramientas para la simulación realista y el entrenamiento en escenarios dinámicos.
- TensorFlow y PyTorch: Marcos avanzados de aprendizaje profundo para el desarrollo de habilidades.
- Laboratorio Isaac: Un entorno abierto para el desarrollo robótico de políticas y el aprendizaje.
Características principales de NVIDIA Isaac GR00T
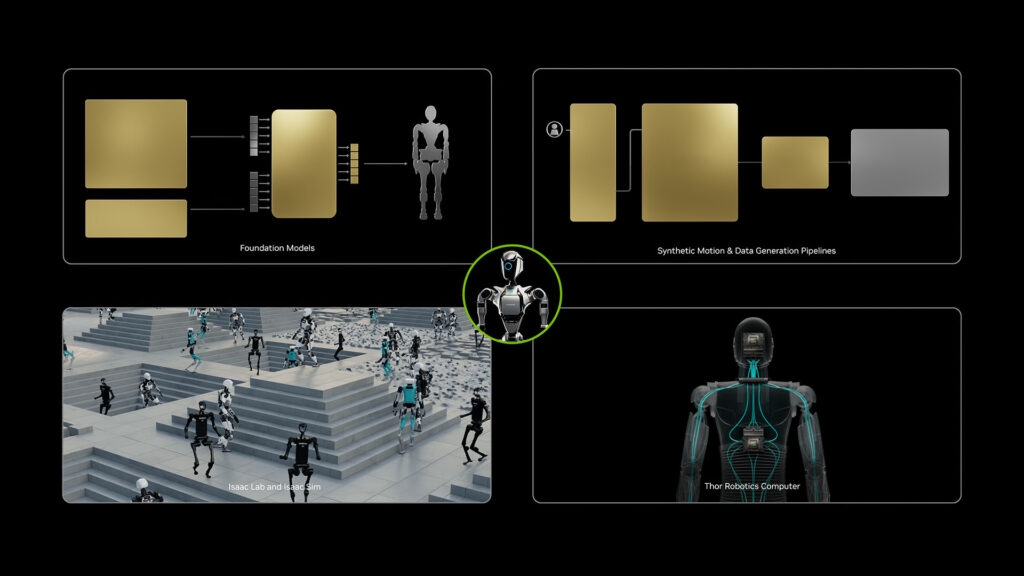
Figura 2: Los componentes principales de NVIDIA Isaac GR00T: modelos básicos, canales de generación de movimiento sintético, integración de Isaac Lab y Sim y Thor Robotics Computer.
Enfoque en el aprendizaje por refuerzo (RL)
- Combina el aprendizaje por refuerzo e imitación para entrenar robots humanoides de manera eficiente.
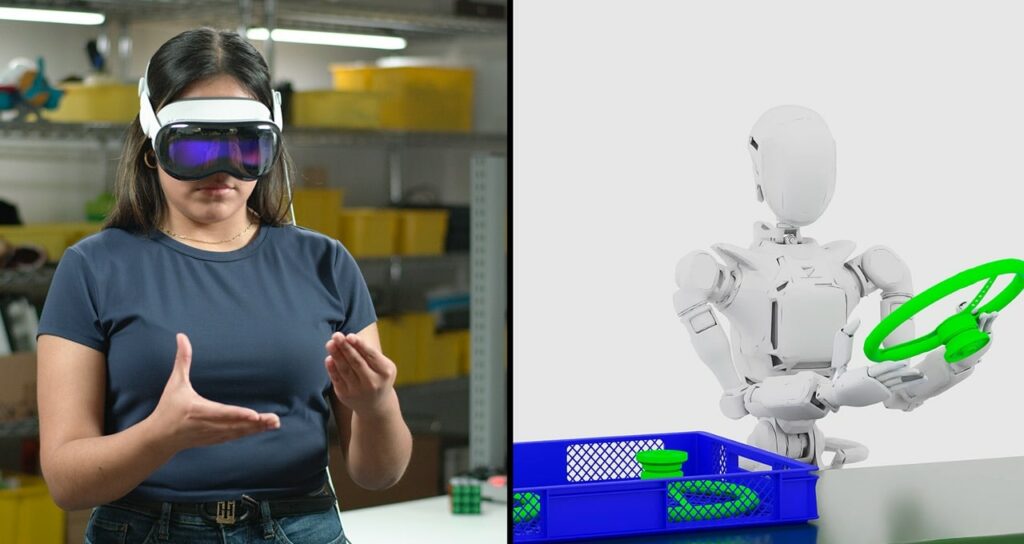
- Aprendizaje por imitación: Herramientas como GR00T-Teleop y dispositivos como Apple Vision Pro capturan las acciones humanas en un gemelo digital para que los robots las repliquen en simulaciones.
- Aprendizaje por refuerzo: Con el apoyo de Isaac Lab (basado en Isaac Sim), permite a los robots aprender mediante prueba y error y agilizar sus flujos de trabajo de formación.
Modelos de IA básicos
- Basado en arquitecturas basadas en transformadores que utilizan TensorFlow y PyTorch para tareas complejas como el reconocimiento de objetos, la interpretación de gestos, la comprensión del habla y la inteligencia emocional.
- Impulsado por el SoC Jetson Thor, con una GPU basada en Blackwell y un motor transformador para una interacción perfecta entre humanos y robots.
Capacidades multimodales
- Integra texto, imágenes, vídeos, audio y demostraciones en vivo para ejecutar tareas específicas del contexto.
- Utiliza modelos de visión avanzados, procesamiento del lenguaje y control motor (por ejemplo, MaskedMimic) para recrear movimientos humanos completos a partir de descripciones parciales o comandos de lenguaje natural.
Compatibilidad de hardware
- Optimizado para funcionar con GPU y plataformas robóticas de NVIDIA para un alto rendimiento en tareas complejas.
- El SoC Jetson Thor ofrece 800 teraflops de rendimiento de IA de 8 bits, impulsado por un clúster de CPU de alto rendimiento y un ancho de banda Ethernet de 100 GB, lo que garantiza un soporte sólido para la exigente robótica humanoide.
¿Cómo funciona NVIDIA Isaac GR00T?
NVIDIA Isaac GR00T funciona como una plataforma modular e integrada diseñada para acelerar el desarrollo de robots humanoides mediante inteligencia artificial avanzada, simulación y generación de datos sintéticos. Su arquitectura está diseñada para abordar las complejidades del aprendizaje y el control de los robots en el mundo real al aprovechar las GPU y las tecnologías de simulación de alto rendimiento de NVIDIA. A continuación se muestra un desglose detallado de su arquitectura y flujos de trabajo.
Descripción general de su arquitectura
NVIDIA Isaac GR00T se compone de varios flujos de trabajo especializados, cada uno diseñado para abordar desafíos específicos en el desarrollo de robots humanoides. Estos flujos de trabajo se pueden usar de forma independiente o combinados para obtener soluciones más completas:
- Teléfono GR00T: Proporciona herramientas avanzadas para recopilar datos de demostración teleoperados:
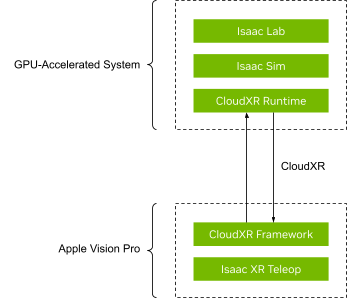
- NVIDIA CloudXR: Conecta unos auriculares Apple Vision Pro a un sistema acelerado por GPU, lo que permite una transmisión fluida de las acciones para la teleoperación humanoide. Utiliza un motor de ejecución CloudXR personalizado, optimizado para ofrecer precisión y baja latencia.
- Isaac XR Teleop: Transmite datos de teleoperación desde y hacia NVIDIA Isaac Sim o Isaac Lab, lo que ofrece a los desarrolladores una forma intuitiva e inmersiva de interactuar con entornos simulados mediante Apple Vision Pro.
- GR00T-Gen: Crea entornos diversos y listos para la simulación para entrenar a los robots en tareas como la manipulación, la navegación y la locomoción. Aprovecha los modelos de IA generativa y la aleatorización de dominios para producir entornos realistas y variados centrados en el ser humano.
- Imitación del GR00T: Facilita la generación de amplios conjuntos de datos de movimiento sintético a partir de demostraciones humanas limitadas. Este flujo de trabajo amplía los esfuerzos de recopilación de datos mediante la interpolación y la simulación, lo que lo convierte en la piedra angular del aprendizaje por imitación.
- Destreza GR00T: Ofrece flujos de trabajo para una manipulación precisa y diestra, utilizando el aprendizaje por refuerzo para entrenar a los robots para que puedan agarrar objetos complejos de principio a fin y manipular objetos complejos.
- Movilidad GR00T: Se centra en la locomoción y la navegación, y proporciona herramientas para entrenar modelos generalistas capaces de operar en entornos variados y desordenados.
- Control GR00T: Permite el control de todo el cuerpo mediante políticas avanzadas de planificación del movimiento y control neuronal. Es compatible con tareas que requieren precisión, como la locomoción humanoide y la manipulación con destreza, y se centra tanto en la teleoperación como en el control autónomo.
- Percepción GR00T: Integra capacidades de detección multimodales, como la visión, el lenguaje y la memoria, mediante herramientas como RemembR, RT-DETR y FoundationPose. Esta suite mejora la adaptabilidad de los robots y el conocimiento de la situación.
Integración perfecta con el ecosistema de Isaac
Isaac GR00T se integra perfectamente con otros proyectos destacados de NVIDIA, como Isaac Lab, Isaac Sim y Omniverse, lo que permite a los investigadores y desarrolladores crear conjuntos de datos de entrenamiento realistas, validar políticas y acelerar el desarrollo de comportamientos robóticos generalizables.
Descripción general del ecosistema de Isaac
El ecosistema Isaac es la plataforma integral de NVIDIA para la innovación robótica, que abarca herramientas y marcos adaptados a cada etapa del desarrollo de los robots. Los componentes clave incluyen:
- Isaac Sim: Una plataforma de simulación de alta fidelidad para crear entornos fotorrealistas y probar las interacciones de los robots.
- Omniverso: Una plataforma colaborativa de diseño y simulación impulsada por Universal Scene Description (USD), que facilita la interoperabilidad y el trabajo en equipo.
- Laboratorio Isaac: Un marco escalable para entrenar y validar los algoritmos de aprendizaje de los robots.
Para obtener más información, puede consultar uno de nuestros blogs anteriores: Explorando NVIDIA Omniverse e Isaac Sim.
Integración con Isaac Sim: simulación de alta fidelidad para robótica
Isaac Sim es la plataforma de simulación central dentro del ecosistema de GR00T, lo que permite la creación de entornos de entrenamiento diversos y altamente realistas. Impulsada por la tecnología NVIDIA RTX, ofrece imágenes fotorrealistas con iluminación, reflejos e interacciones precisas que imitan fielmente las condiciones del mundo real. Su simulación basada en la física garantiza un modelado preciso de las interacciones complejas de los robots, como agarrar objetos, navegar por espacios desordenados y gestionar colisiones.
Isaac Sim también incorpora la asignación aleatoria de dominios, lo que introduce variabilidad en las texturas, la iluminación y la ubicación de los objetos para mejorar la solidez de las políticas capacitadas. Esto garantiza que los robots puedan generalizar de manera eficaz al pasar de la simulación a los escenarios del mundo real. Además, su escalabilidad permite que flujos de trabajo como GR00T-Mimic y GR00T-Gen generen conjuntos de datos grandes y diversos necesarios para entrenar robots humanoides.
Integración con Omniverse: diseño colaborativo y simulación
Omniverse complementa a Isaac Sim al servir como un centro central para diseñar, administrar e integrar contenido 3D en entornos de simulación. Basado en Universal Scene Description (USD), Omniverse permite a los desarrolladores crear y administrar entornos complejos con una escalabilidad y flexibilidad incomparables. Sus herramientas de colaboración en tiempo real permiten a los equipos repetir diseños y escenarios de manera eficiente, lo que reduce el tiempo de desarrollo.
Además, Omniverse integra modelos de IA generativos, lo que respalda la capacidad de GR00T-Gen de producir entornos diversos y centrados en el ser humano. Esta combinación de herramientas de diseño y gestión de datos escalable garantiza una transición fluida entre la generación de datos sintéticos y los flujos de trabajo de entrenamiento, lo que mejora las capacidades generales del GR00T.
Isaac Lab: de los datos sintéticos a las políticas de robots
Isaac Lab desempeña un papel fundamental en la transformación de los datos sintéticos generados por Isaac Sim y Omniverse en políticas robóticas viables. Isaac Lab, que actúa como centro de formación para NVIDIA GR00T, apoya el aprendizaje por refuerzo (RL), el aprendizaje por imitación (IL) y la optimización de políticas, lo que permite a los robots adquirir comportamientos complejos, como la manipulación diestra y la locomoción similar a la humana.
Las principales contribuciones de Isaac Lab incluyen:
- Procesamiento de datos sintéticos: Las trayectorias de movimiento de GR00T-Mimic y los conjuntos de datos ambientales de GR00T-Gen se integran a la perfección en los procesos de formación de Isaac Lab.
- Formación escalable: Gracias a las GPU de NVIDIA, Isaac Lab puede entrenar a miles de robots de forma simultánea, lo que acelera considerablemente el desarrollo de políticas.
- Transferencia de SIM a real: Las políticas capacitadas en simulación se ajustan con precisión para su implementación en el mundo real, superando los desafíos de transferir conocimientos de entornos virtuales a robots físicos.
Esta integración garantiza que los datos sintéticos no solo sean diversos y de alta calidad, sino que también se utilicen de manera eficaz para crear comportamientos robóticos sólidos y generalizables.
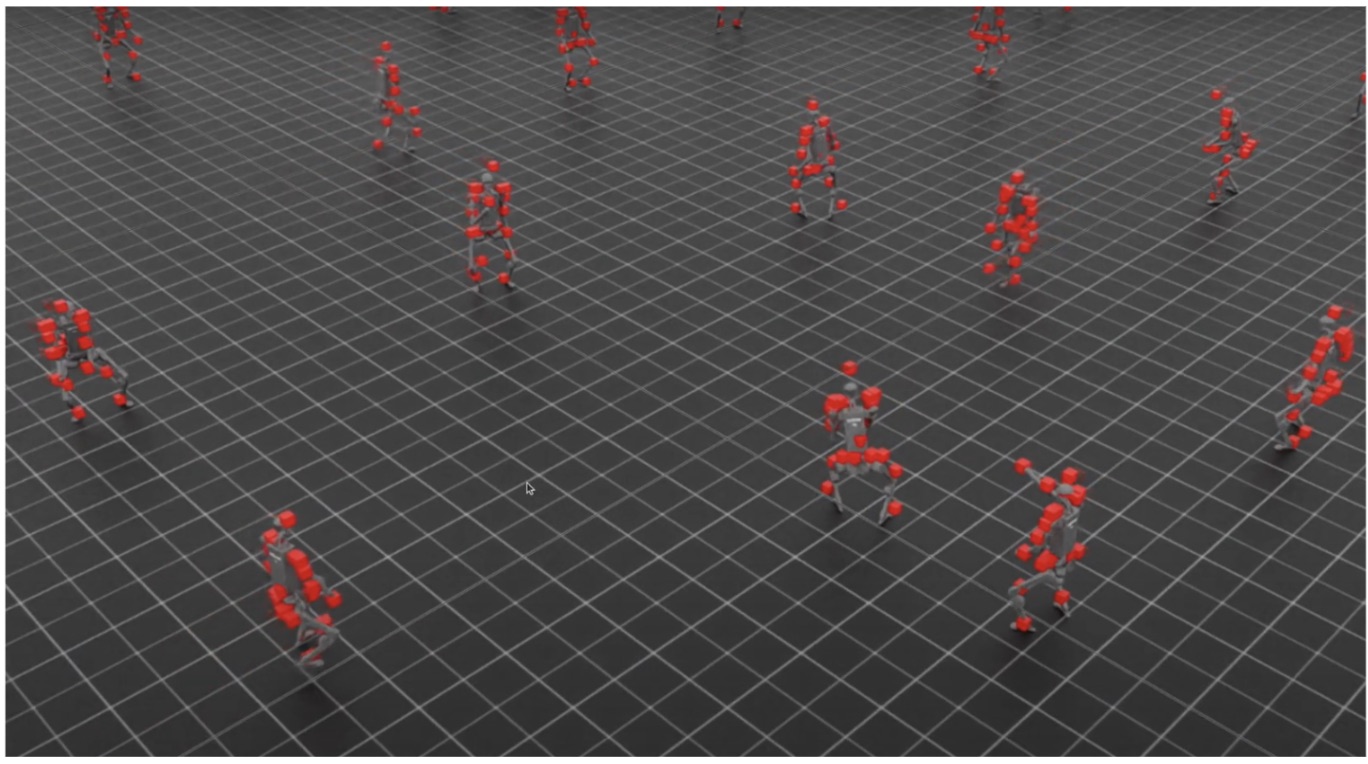
Figura 5: Entrenamiento de robots humanoides de cuerpo entero en Isaac Lab
Aplicaciones y casos de uso
Generación de movimiento sintético para el aprendizaje de robots
El plan Isaac GR00T de NVIDIA para la generación de movimiento sintético es un proceso integral y bien estructurado que integra a la perfección varios componentes para generar datos sintéticos de alta calidad para el aprendizaje de los robots humanoides mediante la imitación del aprendizaje. La interacción entre estos componentes garantiza una recopilación de datos eficiente, la generación de trayectorias y la diversidad de conjuntos de datos, lo que permite a los robots aprender tareas complejas mediante el aprendizaje por imitación. Este proceso se muestra y detalla a continuación.
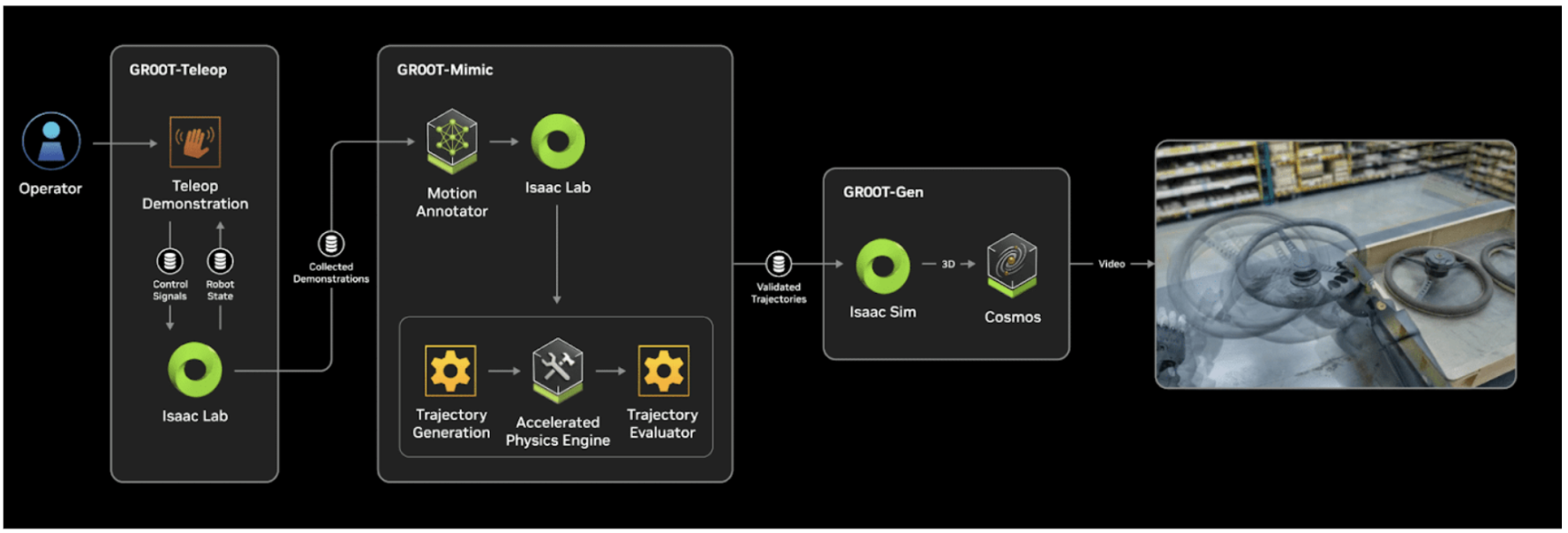
Figura 6: Canalización de generación de movimiento sintético para el aprendizaje de robots humanoides
Paso 1: Recopilación de datos con GR00T-Teleop
El oleoducto comienza con Teleop GR00T, donde un operador usa herramientas como el Apple Vision Pro para teleoperar un robot en un entorno simulado. Las señales de control y el estado del robot se transmiten a Laboratorio Isaac, que captura demostraciones humanas detalladas. Estas demostraciones constituyen los datos fundamentales para generar trayectorias sintéticas. La configuración de teleoperación inmersiva garantiza que los datos representen acciones humanas naturales y precisas.
Paso 2: Anotación de movimiento y generación de trayectorias en GR00t-Mimic
Una vez recogidas las manifestaciones teleoperadas, se pasan a Mímico de GR00T. Este módulo anota los puntos clave de las demostraciones recopiladas y los utiliza para generar amplias trayectorias de movimiento sintético. El proceso incluye:
- Generación de trayectorias: Producir trayectorias realistas que imitan los movimientos humanos.
- Aceleración física: Aprovechar el motor de física acelerada de Isaac Lab para refinar estas trayectorias y garantizar que se alineen con la dinámica del mundo real.
- Evaluación de trayectoria: Validar las trayectorias generadas para garantizar que cumplan con los estándares contextuales y de calidad para la capacitación.
Paso 3: Diversidad ambiental con GR00T-Gen
Las trayectorias de movimiento validadas de GR00t-Mimic se envían luego a GR00T-Gen, que utiliza Isaac Sim y Cosmos para crear diversos entornos de simulación. El GR00T-Gen incorpora:
- Distribución aleatoria de dominios: Agregar variabilidad en los factores ambientales como la iluminación, las texturas y la ubicación de los objetos para mejorar la generalización de los datos.
- Generación de escenas 3D: Cosmos enriquece los conjuntos de datos sintéticos al producir entornos 3D altamente realistas que replican las condiciones del mundo real.
Paso 4: Resultado final e integración
El proceso completo da como resultado un conjunto de datos que combina trayectorias realistas y entornos diversos. El resultado final se puede utilizar para entrenar las políticas robóticas en Isaac Lab, lo que permite a los robots adaptarse de manera eficiente a entornos y tareas centrados en el ser humano.
Posibles aplicaciones en el mundo real
NVIDIA Isaac GR00T está diseñada para sentar las bases para la futura integración de los robots humanoides en entornos del mundo real. Si bien actualmente se centra en la validación de los flujos de trabajo en simulaciones virtuales, la capacidad del GR00T para generar datos sintéticos de alta calidad y formar políticas avanzadas lo posiciona como una herramienta fundamental para preparar a los robots para que aborden tareas complejas centradas en el ser humano. Estos avances abren la puerta a varias aplicaciones potenciales, entre las que se incluyen:
- Robótica asistencial en el cuidado de la salud: Apoyar a las personas con problemas de movilidad, ayudar en la atención de los pacientes y reducir la carga de trabajo de los cuidadores mediante tareas clínicas.
- Automatización industrial: Realizar operaciones de ensamblaje complejas y adaptarse sin problemas a los flujos de trabajo de fabricación existentes, lo que mejora la productividad y la flexibilidad.
- Entornos de emergencia y peligrosos: Navegar por las zonas de desastre, rescatar a los supervivientes y manipular de forma segura materiales peligrosos en condiciones inadecuadas para los trabajadores humanos.
Si bien estas aplicaciones son prospectivas, el enfoque de GR00T en el desarrollo basado en la simulación y en los flujos de trabajo de capacitación eficientes está allanando el camino para que los robots humanoides aborden desafíos críticos y remodelen las industrias en un futuro próximo.
Ventajas y limitaciones de NVIDIA Isaac GR00T
Ventajas
- Desarrollo acelerado: Proporciona una lista completa de herramientas, incluidos modelos de bases robóticas, canalizaciones de datos y marcos de simulación, que aceleran significativamente el desarrollo de robots humanoides.
- Escalabilidad: La plataforma permite la generación de grandes conjuntos de datos de movimiento sintéticos a partir de demostraciones humanas mínimas, lo que facilita una amplia formación sin la necesidad de recopilar datos exhaustivos del mundo real.
- Integración avanzada de IA: Al incorporar sofisticadas capacidades de inteligencia artificial y aprendizaje automático, el GR00T permite a los robots ejecutar tareas de manera eficiente basándose en instrucciones multimodales, lo que mejora su adaptabilidad y rendimiento en diversas aplicaciones.
- Integración perfecta con los recursos de NVIDIA: El GR00T está diseñado para coexistir e integrarse fácilmente con otras iniciativas de NVIDIA, como Isaac Sim, Isaac Lab y Omniverse. Esta interoperabilidad permite a los desarrolladores utilizar todo el ecosistema de NVIDIA, lo que garantiza una transición fluida entre los flujos de trabajo de simulación, generación de datos y entrenamiento.
Limitaciones
- Altos requisitos computacionales: La implementación de los modelos avanzados de IA y las herramientas de simulación de GR00T requiere importantes recursos computacionales, lo que puede plantear desafíos para las organizaciones con acceso limitado a hardware de alto rendimiento.
- Curva de aprendizaje: La complejidad de las herramientas y los flujos de trabajo integrados de GR00T puede requerir que los desarrolladores inviertan tiempo en aprender y adaptarse a la plataforma, lo que podría extender la fase de desarrollo inicial.
Conclusión y futuro de NVIDIA Isaac GR00T
NVIDIA Isaac GR00T representa un avance significativo en la robótica humanoide, ya que ofrece una plataforma sólida que integra inteligencia artificial avanzada, generación de datos escalable y herramientas de simulación integrales. Al abordar los desafíos clave del aprendizaje y el desarrollo de robots, el GR00T allana el camino para robots humanoides más inteligentes, adaptables y capaces. A medida que la plataforma evolucione, podemos anticipar nuevas mejoras en la integración de la inteligencia artificial, la accesibilidad de los usuarios y la eficiencia computacional, lo que consolidará el papel del GR00T como catalizador de la innovación en el campo de la robótica humanoide, en rápido crecimiento.
Glosario
¿Qué es un robot humanoide?
Los humanoides son robots bípedos de uso general que siguen el modelo del factor de forma humano y están diseñados para trabajar junto a los humanos para aumentar la productividad. Son capaces de aprender y realizar una variedad de tareas, como agarrar un objeto, mover un contenedor, cargar o descargar cajas, etc.
¿Qué es el aprendizaje robótico?
El aprendizaje robótico es un conjunto de algoritmos y metodologías que ayudan a un robot a aprender nuevas habilidades, como la manipulación, la locomoción y la clasificación, en un entorno simulado o real.
Fuentes:
- Avanzando en el desarrollo de la visión y las habilidades de los robots humanoides con el Proyecto GR00T de NVIDIA
- Construyendo un canal de generación de movimiento sintético para el aprendizaje de robots humanoides
- NVIDIA pone los modelos de Cosmos World Foundation a disposición de la comunidad de desarrolladores de IA física.
- El blog de Marvik: Explorando NVIDIA Omniverse e Isaac Sim
- Nuevo blog de Marvik: Generación de conjuntos de datos sintéticos (SDG) basados en escenas con Isaac Sim
- El blog de Marvik: Nvidia Omniverse — Isaac Sim — Introducción a la descripción universal de escenas
- https://nvidianews.nvidia.com/news/foundation-model-isaac-robotics-platform
- https://medium.com/@nimritakoul01/project-gr00t-generalist-humanoid-robot-00-technology-from-nvidia-80f12f4d0449
- https://blogs.nvidia.com/blog/isaac-gr00t-blueprint-humanoid-robotics/


.png)