
Explorando o NVIDIA Isaac GR00T






A robótica humanóide está transformando profundamente nosso relacionamento com as máquinas, permitindo interações mais naturais e adaptáveis. Nesse campo em rápida evolução, a NVIDIA Isaac GR00T se posiciona como uma inovação essencial que integra inteligência artificial multimodal capaz de processar dados de várias fontes, entender e replicar ações humanas e se adaptar de forma autônoma a ambientes dinâmicos. Esse avanço representa uma mudança crucial. Isso marca um avanço significativo em setores-chave, como indústria, saúde e sustentabilidade, ao mesmo tempo em que aborda desafios globais, como escassez de mão de obra, demandas de personalização e busca por soluções eficientes e sustentáveis.
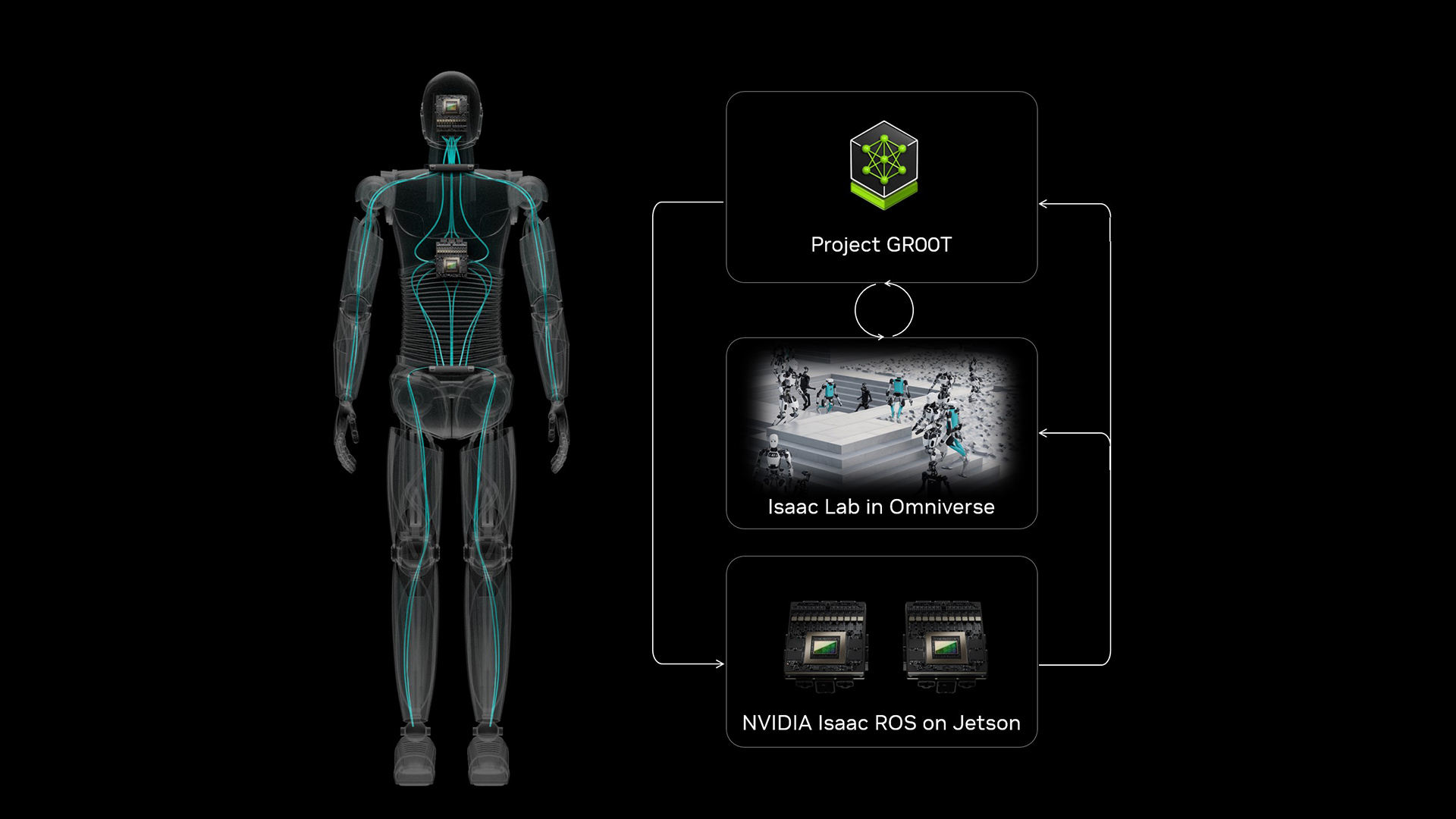
Figura 1: Ecossistema NVIDIA Isaac GR00T ligando GR00T, Isaac Lab no Omniverse e Isaac ROS no Jetson para desenvolvimento de robótica.
O impacto da NVIDIA Isaac GR00T se estende a um público amplo, incluindo pesquisadores, desenvolvedores de tecnologia, líderes de negócios e entusiastas da robótica que buscam aproveitar seu potencial transformador. Os engenheiros de inteligência artificial encontram no GR00T uma ferramenta exclusiva para explorar modelos que permitem que os robôs aprendam, se adaptem e colaborem em tarefas complexas, enquanto aqueles que tomam decisões estratégicas em setores industriais descobrem uma solução inovadora que conecta a inteligência artificial às necessidades emergentes da sociedade. Os tomadores de decisão estratégicos em setores industriais podem aproveitar o GR00T para alinhar as capacidades de IA às demandas da sociedade. Essa tecnologia não apenas aumenta a produtividade e melhora a qualidade de vida, mas também se estabelece como um catalisador para um futuro em que humanos e robôs colaboram de forma eficiente, expandindo assim as possibilidades de desenvolvimento em um mundo em constante evolução.
O que é NVIDIA Isaac GR00T?
A NVIDIA Isaac GR00T, ou Generalist Robot 00 Technology, é uma plataforma inovadora que estabelece uma nova estrutura para o desenvolvimento de robótica humanóide por meio da integração de inteligência artificial (IA) e recursos de aprendizado multimodal. O Isaac GR00T atua como a “mente” dos robôs humanóides, permitindo que eles entendam a linguagem natural, analisem informações de várias fontes, como texto, voz, vídeo e demonstrações humanas, e adquiram habilidades essenciais para se adaptar a tarefas complexas em vários ambientes.
A abordagem multimodal do GR00T reside em sua capacidade de processar e combinar informações de diferentes canais, permitindo que os robôs entendam os contextos de forma holística e realizem ações com um alto nível de habilidade e coordenação. Essa capacidade de integrar várias modalidades não apenas acelera o aprendizado, mas também otimiza a interação homem-robô, permitindo que os robôs interpretem as intenções e demandas humanas de forma mais intuitiva ao combinar fluxos de dados. O GR00T acelera o aprendizado enquanto promove interações homem-robô intuitivas e perfeitas.
O GR00T foi projetado para suportar o aprendizado rápido e contínuo em cenários simulados e do mundo real, permitindo que os robôs desenvolvam habilidades que vão além da mera execução mecânica. Conforme mencionado anteriormente, graças à sua capacidade de observar e aprender com as ações humanas, os robôs podem adquirir conhecimentos práticos que lhes permitem operar em ambientes dinâmicos, respondendo aos desafios em tempo real com níveis de precisão e adaptabilidade.
Para garantir seu sucesso, a NVIDIA Isaac GR00T integra tecnologias avançadas, como:
- Jetson Thor: Um sistema em chip (SoC) especializado para tarefas robóticas complexas.
- Omniverse e Isaac Sim: Ferramentas para simulação realista e treinamento de cenários dinâmicos.
- TensorFlow e PyTorch: Estruturas avançadas de aprendizado profundo para desenvolvimento de habilidades.
- Laboratório Isaac: Um ambiente aberto para desenvolvimento e aprendizado de políticas robóticas.
Principais características do NVIDIA Isaac GR00T
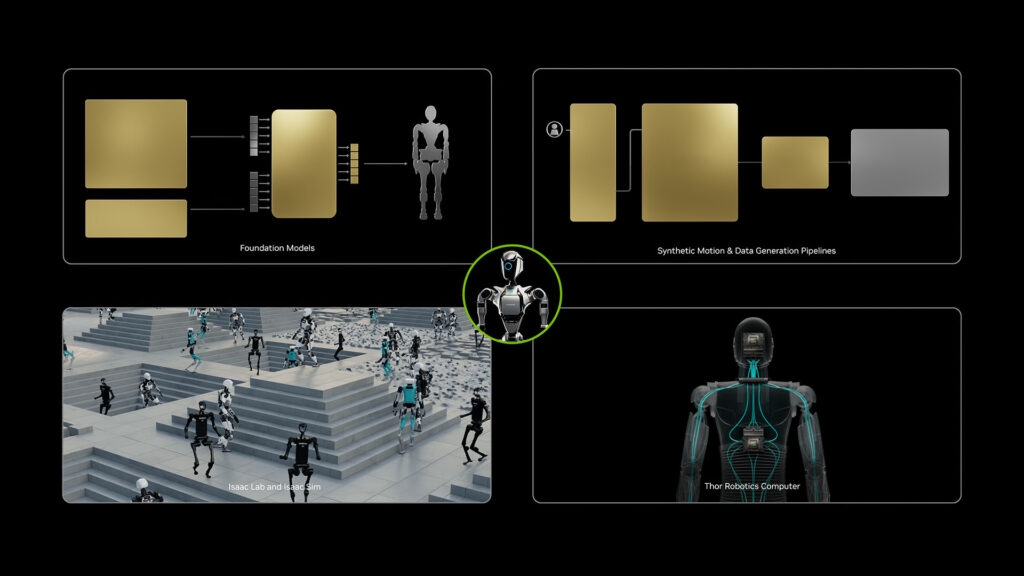
Figura 2: Componentes principais do NVIDIA Isaac GR00T: modelos básicos, pipelines de geração de movimento sintético, integração entre Isaac Lab e Sim e Thor Robotics Computer.
Foco no Aprendizado por Reforço (RL)
- Combina aprendizado por reforço e imitação para treinar robôs humanóides com eficiência.
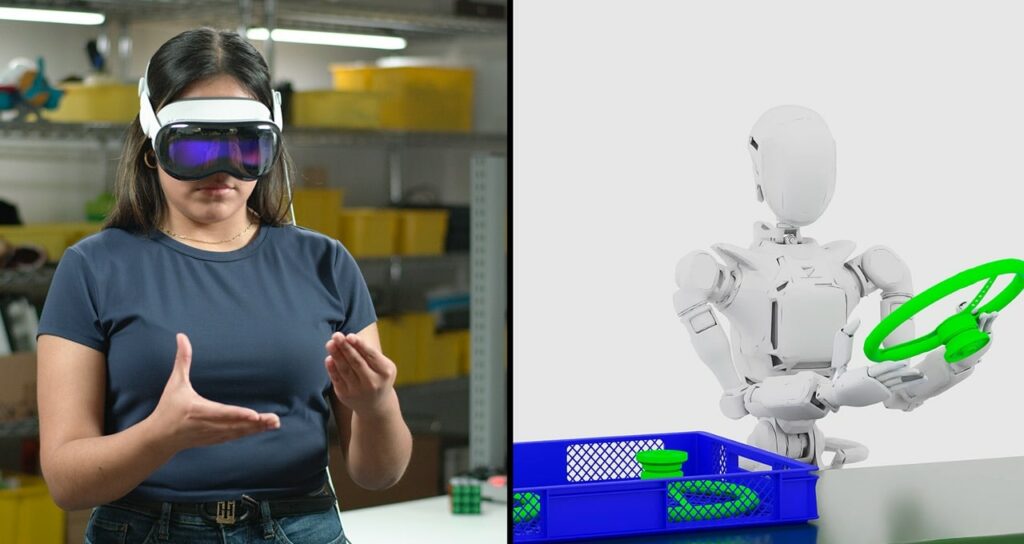
- Aprendizagem por imitação: Ferramentas como o GR00T-Teleop e dispositivos como o Apple Vision Pro capturam ações humanas em um gêmeo digital para que os robôs as repliquem em simulações.
- Aprendizagem por reforço: Apoiado pelo Isaac Lab (baseado no Isaac Sim), permitindo que os robôs aprendam por tentativa e erro e otimizem seus fluxos de trabalho de treinamento.
Modelos básicos de IA
- Construído em arquiteturas baseadas em transformadores usando TensorFlow e PyTorch para tarefas complexas, como reconhecimento de objetos, interpretação de gestos, compreensão de fala e inteligência emocional.
- Equipado com o Jetson Thor SoC, com uma GPU baseada em Blackwell e um motor de transformador para uma interação perfeita entre homem e robô.
Capacidades multimodais
- Integra texto, imagens, vídeos, áudio e demonstrações ao vivo para executar tarefas específicas do contexto.
- Usa modelos avançados de visão, processamento de linguagem e controle motor (por exemplo, MaskedMimic) para recriar movimentos humanos completos a partir de descrições parciais ou comandos de linguagem natural.
Compatibilidade de hardware
- Otimizado para trabalhar com GPUs NVIDIA e plataformas robóticas para alto desempenho em tarefas complexas.
- O Jetson Thor SoC oferece 800 teraflops de desempenho de IA de 8 bits, alimentado por um cluster de CPU de alto desempenho e largura de banda Ethernet de 100 GB, garantindo suporte robusto para robótica humanóide exigente.
Como funciona o NVIDIA Isaac GR00T?
O NVIDIA Isaac GR00T opera como uma plataforma modular e integrada projetada para acelerar o desenvolvimento de robôs humanóides por meio de IA avançada, simulação e geração de dados sintéticos. Sua arquitetura foi criada para lidar com as complexidades do aprendizado e controle de robôs do mundo real, aproveitando as GPUs de alto desempenho e as tecnologias de simulação da NVIDIA. Abaixo está uma análise detalhada de sua arquitetura e fluxos de trabalho.
Visão geral de sua arquitetura
O NVIDIA Isaac GR00T é composto por vários fluxos de trabalho especializados, cada um projetado para enfrentar desafios específicos no desenvolvimento de robôs humanóides. Esses fluxos de trabalho podem ser usados de forma independente ou combinados para soluções mais abrangentes:
- GR00T-teleop: Fornece ferramentas avançadas para coletar dados de demonstração teleoperados:
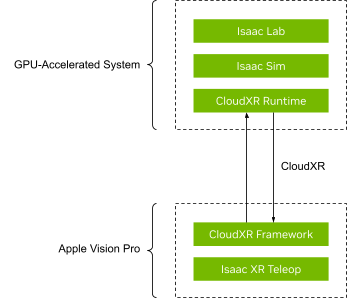
- NVIDIA CloudXR: Conecta um fone de ouvido Apple Vision Pro a um sistema acelerado por GPU, permitindo a transmissão contínua de ações para teleoperação humanóide. Ele usa um tempo de execução personalizado do CloudXR otimizado para precisão e baixa latência.
- Isaac XR Teleop: Transmite dados de teleoperação de e para o NVIDIA Isaac Sim ou Isaac Lab, oferecendo aos desenvolvedores uma maneira intuitiva e imersiva de interagir com ambientes simulados usando o Apple Vision Pro.
- Geração GR00T: Cria ambientes diversos e prontos para simulação para treinar robôs em tarefas como manipulação, navegação e locomoção. Ele aproveita modelos generativos de IA e randomização de domínios para produzir ambientes realistas e variados centrados no ser humano.
- Imite o GR00T: Facilita a geração de extensos conjuntos de dados de movimento sintético a partir de demonstrações humanas limitadas. Esse fluxo de trabalho dimensiona os esforços de coleta de dados por meio de interpolação e simulação, tornando-o um pilar para o aprendizado por imitação.
- Destreza GR00T: Oferece fluxos de trabalho para manipulação refinada e ágil, usando o aprendizado por reforço para treinar robôs para agarrar de ponta a ponta e manusear objetos complexos.
- Mobilidade GR00T: Concentra-se na locomoção e navegação, fornecendo ferramentas para treinar modelos generalistas capazes de operar em ambientes variados e desordenados.
- Controle GR00T: Permite o controle de todo o corpo por meio de políticas avançadas de planejamento de movimento e controle neural. Ele suporta tarefas que exigem precisão, como locomoção humanóide e manipulação hábil, com foco na teleoperação e no controle autônomo.
- Percepção de GR00T: Integra recursos de detecção multimodal, como visão, linguagem e memória, usando ferramentas como Remembr, RT-DETR e FoundationPose. Esta suíte aprimora a adaptabilidade do robô e a consciência situacional.
Integração perfeita com o ecossistema Isaac
O Isaac GR00T se integra perfeitamente a outros projetos proeminentes da NVIDIA, como Isaac Lab, Isaac Sim e Omniverse, permitindo que pesquisadores e desenvolvedores criem conjuntos de dados de treinamento realistas, validem políticas e acelerem o desenvolvimento de comportamentos robóticos generalizáveis.
Visão geral do ecossistema Isaac
O ecossistema Isaac é a plataforma abrangente da NVIDIA para inovação em robótica, abrangendo ferramentas e estruturas personalizadas para cada estágio do desenvolvimento de robôs. Os principais componentes incluem:
- Isaac Sim: Uma plataforma de simulação de alta fidelidade para criar ambientes fotorrealistas e testar interações com robôs.
- Omniverso: Uma plataforma colaborativa de design e simulação com tecnologia Universal Scene Description (USD), facilitando a interoperabilidade e o trabalho em equipe.
- Laboratório Isaac: Uma estrutura escalável para treinar e validar algoritmos de aprendizado de robôs.
Para obter mais informações, você pode conferir um dos nossos blogs anteriores: Explorando o NVIDIA Omniverse e o Isaac Sim.
Integração com Isaac Sim: simulação de alta fidelidade para robótica
O Isaac Sim serve como a principal plataforma de simulação no ecossistema do GR00T, permitindo a criação de ambientes de treinamento altamente realistas e diversificados. Equipado com a tecnologia NVIDIA RTX, ele oferece visuais fotorrealistas com iluminação, reflexos e interações precisas que imitam de perto as condições do mundo real. Sua simulação baseada em física garante uma modelagem precisa de interações complexas de robôs, como agarrar objetos, navegar por espaços desordenados e lidar com colisões.
O Isaac Sim também incorpora a randomização de domínios, introduzindo variabilidade em texturas, iluminação e posicionamento de objetos para aprimorar a robustez das políticas treinadas. Isso garante que os robôs possam generalizar de forma eficaz ao fazer a transição da simulação para cenários do mundo real. Além disso, sua escalabilidade permite que fluxos de trabalho como o GR00T-Mimic e o GR00T-gen gerem conjuntos de dados grandes e diversos necessários para o treinamento de robôs humanóides.
Integração com o Omniverse: design colaborativo e simulação
O Omniverse complementa Isaac Sim servindo como um hub central para projetar, gerenciar e integrar conteúdo 3D em ambientes de simulação. Construído com base na Universal Scene Description (USD), o Omniverse permite que os desenvolvedores criem e gerenciem ambientes complexos com escalabilidade e flexibilidade incomparáveis. Suas ferramentas de colaboração em tempo real permitem que as equipes repitam projetos e cenários de forma eficiente, reduzindo o tempo de desenvolvimento.
Além disso, o Omniverse integra modelos generativos de IA, apoiando a capacidade do GR00T-gen de produzir ambientes diversos e centrados no ser humano. Essa combinação de ferramentas de design e gerenciamento de dados escalável garante transições suaves entre a geração de dados sintéticos e os fluxos de trabalho de treinamento, aprimorando os recursos gerais do GR00T.
Isaac Lab: De dados sintéticos a políticas de robôs
O Isaac Lab desempenha um papel fundamental na transformação de dados sintéticos gerados por Isaac Sim e Omniverse em políticas de robôs acionáveis. Atuando como centro de treinamento da NVIDIA GR00T, o Isaac Lab oferece suporte ao aprendizado por reforço (RL), ao aprendizado por imitação (IL) e à otimização de políticas, permitindo que os robôs adquiram comportamentos complexos, como manipulação hábil e locomoção semelhante à humana.
As principais contribuições do Isaac Lab incluem:
- Processamento sintético de dados: As trajetórias de movimento do GR00t-Mimic e os conjuntos de dados ambientais do GR00T-gen são perfeitamente integradas aos canais de treinamento do Isaac Lab.
- Treinamento escalável: Aproveitando as GPUs NVIDIA, o Isaac Lab pode treinar milhares de robôs simultaneamente, acelerando drasticamente o desenvolvimento de políticas.
- Transferência de SIM para real: As políticas treinadas em simulação são ajustadas para implantação no mundo real, superando os desafios de transferir conhecimento de ambientes virtuais para robôs físicos.
Essa integração garante que os dados sintéticos não sejam apenas diversos e de alta qualidade, mas também utilizados de forma eficaz para criar comportamentos robóticos robustos e generalizáveis.
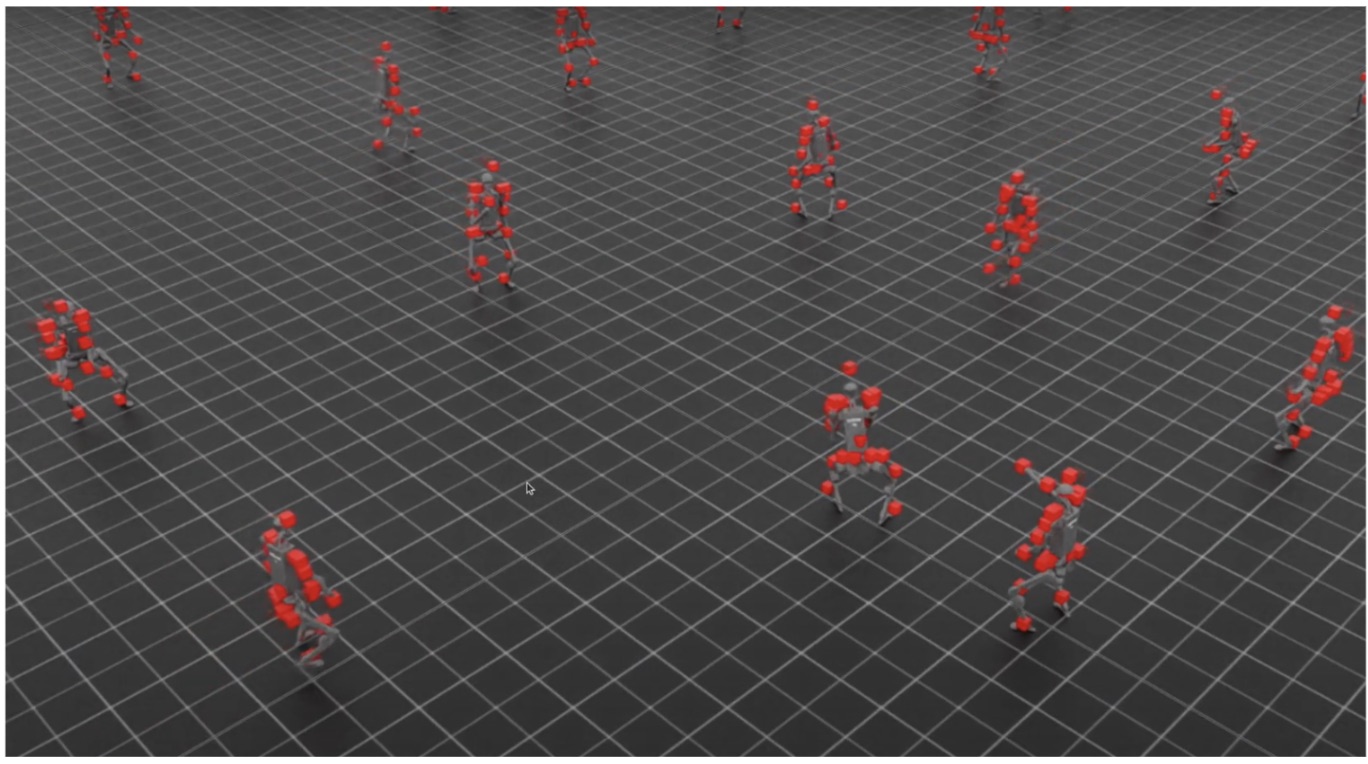
Figura 5: Treinamento de robôs humanóides de corpo inteiro no Laboratório Isaac
Aplicativos e casos de uso
Geração de movimento sintético para aprendizado de robôs
O NVIDIA Isaac GR00T Blueprint for Synthetic Motion Generation é um pipeline bem estruturado de ponta a ponta que integra perfeitamente vários componentes para gerar dados sintéticos de alta qualidade para o aprendizado de robôs humanóides por meio da imitação do aprendizado. A interação entre esses componentes garante a coleta eficiente de dados, a geração de trajetórias e a diversidade do conjunto de dados, permitindo que os robôs aprendam tarefas complexas por meio do aprendizado por imitação. Esse pipeline é mostrado e detalhado abaixo.
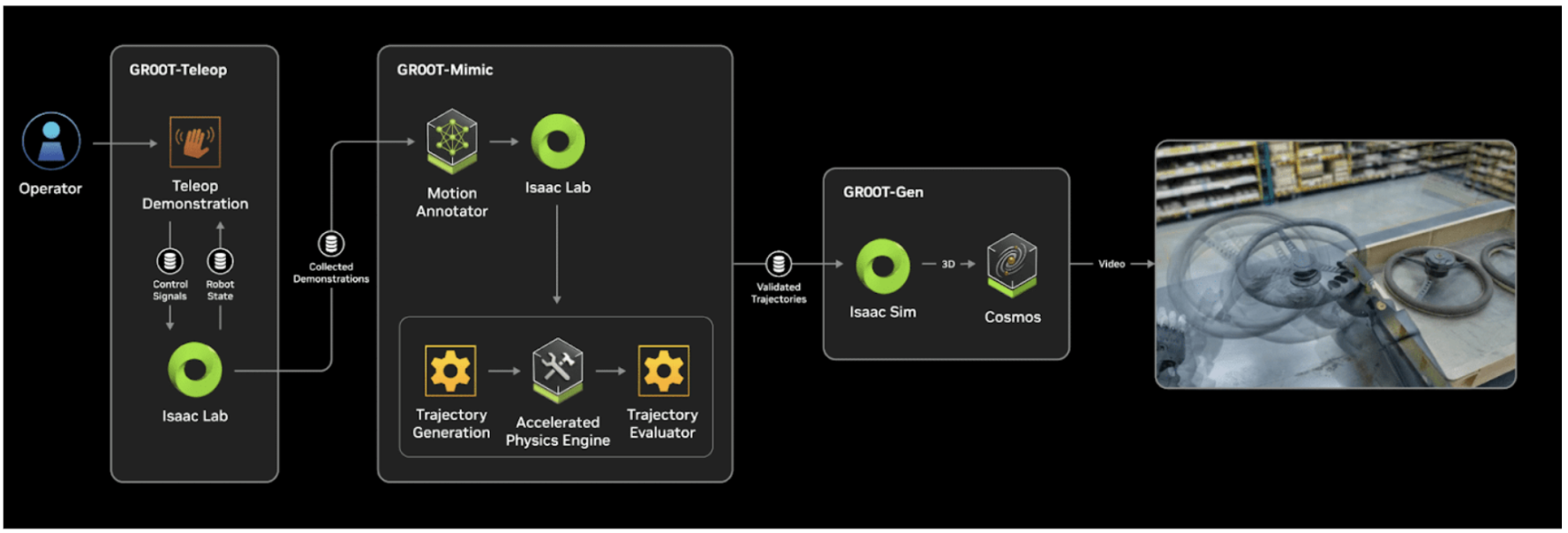
Figura 6: Pipeline de geração de movimento sintético para aprendizado de robôs humanóides
Etapa 1: Coleta de dados com GR00T-Teleop
O pipeline começa com GR00T-teleop, em que um operador usa ferramentas como o Apple Vision Pro para teleoperar um robô em um ambiente simulado. Os sinais de controle e o estado do robô são transmitidos para Laboratório Isaac, capturando demonstrações humanas detalhadas. Essas demonstrações formam os dados fundamentais para gerar trajetórias sintéticas. A configuração imersiva de teleoperação garante que os dados representem ações humanas naturais e precisas.
Etapa 2: Anotação de movimento e geração de trajetória no GR00T-Mimic
Uma vez coletadas as demonstrações teleoperadas, elas são passadas para Mímico de GR00T. Este módulo anota pontos-chave nas demonstrações coletadas e os usa para gerar extensas trajetórias de movimento sintético. O processo inclui:
- Geração de trajetória: Produzindo trajetórias realistas que imitam os movimentos humanos.
- Aceleração física: Aproveitando o mecanismo de física acelerada do Isaac Lab para refinar essas trajetórias, garantindo que elas se alinhem com a dinâmica do mundo real.
- Avaliação da trajetória: Validar as trajetórias geradas para garantir que atendam aos padrões contextuais e de qualidade de treinamento.
Etapa 3: Diversidade ambiental com GR00T-gen
As trajetórias de movimento validadas do GR00T-Mimic são então enviadas para GR00T-gen, que usa Isaac Sim e Cosmos para criar diversos ambientes de simulação. O GR00T-gen incorpora:
- Randomização de domínio: Adicionar variabilidade em fatores ambientais, como iluminação, texturas e posicionamento de objetos, para aprimorar a generalização dos dados.
- Geração de cenas 3D: O Cosmos enriquece os conjuntos de dados sintéticos ao produzir ambientes 3D altamente realistas que replicam as condições do mundo real.
Etapa 4: Saída final e integração
O pipeline completo resulta em um conjunto de dados que combina trajetórias realistas e ambientes diversos. O resultado final pode ser usado para treinar políticas de robôs no Isaac Lab, permitindo que os robôs se adaptem a ambientes e tarefas centrados no ser humano de forma eficiente.
Possíveis aplicações no mundo real
O NVIDIA Isaac GR00T foi projetado para estabelecer as bases para a integração futura de robôs humanóides em ambientes do mundo real. Embora seu foco atual seja validar fluxos de trabalho em simulações virtuais, a capacidade do GR00T de gerar dados sintéticos de alta qualidade e treinar políticas avançadas o posiciona como uma ferramenta crítica para preparar robôs para lidar com tarefas complexas e centradas no ser humano. Esses avanços abrem as portas para várias aplicações em potencial, incluindo:
- Robótica assistiva na área da saúde: Apoiar indivíduos com desafios de mobilidade, auxiliar no atendimento ao paciente e reduzir a carga de trabalho dos cuidadores por meio de tarefas clínicas.
- Automação industrial: Realizar operações de montagem complexas e se adaptar perfeitamente aos fluxos de trabalho de fabricação existentes, aumentando a produtividade e a flexibilidade.
- Ambientes de emergência e perigosos: Navegar em zonas de desastre, resgatar sobreviventes e manusear com segurança materiais perigosos em condições inadequadas para trabalhadores humanos.
Embora essas aplicações sejam prospectivas, o foco do GR00T no desenvolvimento orientado por simulação e fluxos de trabalho de treinamento eficientes está abrindo caminho para que robôs humanóides enfrentem desafios críticos e remodelem indústrias em um futuro próximo.
Vantagens e limitações do NVIDIA Isaac GR00T
Vantagens
- Desenvolvimento acelerado: Fornece uma lista abrangente de ferramentas, incluindo modelos de base de robôs, pipelines de dados e estruturas de simulação, que aceleram significativamente o desenvolvimento de robôs humanóides.
- Escalabilidade: A plataforma permite a geração de grandes conjuntos de dados de movimento sintético a partir de demonstrações humanas mínimas, facilitando o treinamento extensivo sem a necessidade de uma coleta exaustiva de dados do mundo real.
- Integração avançada de IA: Ao incorporar recursos sofisticados de IA e aprendizado de máquina, o GR00T permite que os robôs executem tarefas com eficiência com base em instruções multimodais, aprimorando sua adaptabilidade e desempenho em várias aplicações.
- Integração perfeita com os recursos da NVIDIA: O GR00T foi projetado para coexistir e se integrar facilmente a outras iniciativas da NVIDIA, como Isaac Sim, Isaac Lab e Omniverse. Essa interoperabilidade permite que os desenvolvedores utilizem toda a amplitude do ecossistema da NVIDIA, garantindo transições suaves entre fluxos de trabalho de simulação, geração de dados e treinamento.
Limitações
- Altos requisitos computacionais: A implementação dos modelos avançados de IA e das ferramentas de simulação do GR00T exige recursos computacionais substanciais, o que pode representar desafios para organizações com acesso limitado a hardware de alto desempenho.
- Curva de aprendizado: A complexidade das ferramentas e fluxos de trabalho integrados do GR00T pode exigir que os desenvolvedores invistam tempo no aprendizado e na adaptação à plataforma, potencialmente estendendo a fase inicial de desenvolvimento.
Conclusão e futuro da NVIDIA Isaac GR00T
O NVIDIA Isaac GR00T representa um avanço significativo na robótica humanóide, oferecendo uma plataforma robusta que integra IA avançada, geração de dados escalável e ferramentas de simulação abrangentes. Ao abordar os principais desafios no aprendizado e desenvolvimento de robôs, o GR00T abre caminho para robôs humanóides mais inteligentes, adaptáveis e capazes. À medida que a plataforma evolui, podemos antecipar novos aprimoramentos na integração de IA, acessibilidade do usuário e eficiência computacional, solidificando o papel do GR00T como catalisador de inovação no campo de rápido crescimento da robótica humanóide.
Glossário
O que é um robô humanóide?
Os humanóides são robôs bípedes de uso geral, modelados de acordo com o formato humano e projetados para trabalhar junto com humanos para aumentar a produtividade. Eles são capazes de aprender e realizar uma variedade de tarefas, como agarrar um objeto, mover um contêiner, carregar ou descarregar caixas e muito mais.
O que é aprendizado de robôs?
O aprendizado de robôs é uma coleção de algoritmos e metodologias que ajudam um robô a aprender novas habilidades, como manipulação, locomoção e classificação em um ambiente simulado ou real.
Fontes:
- Avançando a visão e o desenvolvimento de habilidades de robôs humanóides com o Projeto NVIDIA GR00T
- Construindo um pipeline de geração de movimento sintético para o aprendizado de robôs humanóides
- A NVIDIA disponibiliza abertamente os modelos da Cosmos World Foundation para a comunidade física de desenvolvedores de IA.
- Blog de Marvik: Explorando o NVIDIA Omniverse e o Isaac Sim
- Novo blog da Marvik: Geração de conjuntos de dados sintéticos (SDG) com base em cenas usando Isaac Sim
- Blog da Marvik: Nvidia Omniverse — Isaac Sim — Introdução à descrição universal de cenas
- https://nvidianews.nvidia.com/news/foundation-model-isaac-robotics-platform
- https://medium.com/@nimritakoul01/project-gr00t-generalist-humanoid-robot-00-technology-from-nvidia-80f12f4d0449
- https://blogs.nvidia.com/blog/isaac-gr00t-blueprint-humanoid-robotics/


.png)